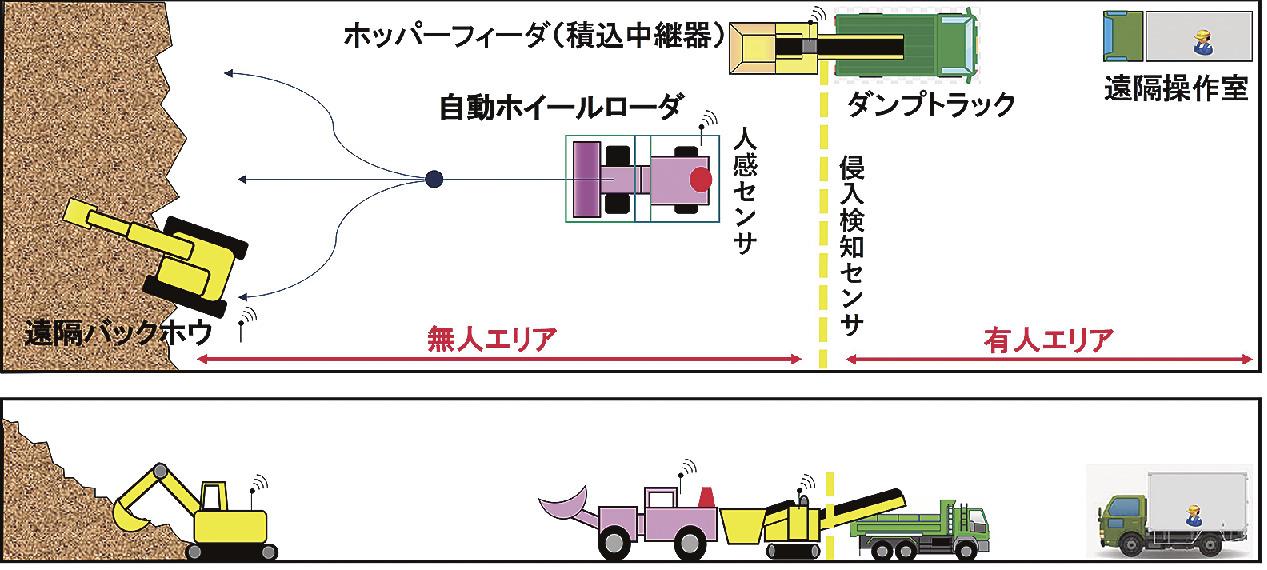
鹿島は山岳トンネル工事の「ずり出し」作業の自動化に成功した。岐阜県飛騨市の神岡試験坑道で実証工事を実施。自動ホイールローダーによるずり(岩砕)のすくい取りから運搬、荷下ろしまでの一連作業を自動化。機…
残り 701文字
このコンテンツは会員限定です。
記事の続きをお読みいただくためには
電子版への登録が必要です。
新規会員登録
ログイン

鹿島/山岳トンネル工事でずり出しを自動化・無人化、飛躍的に安全性向上
2024年7月11日 技術・商品 [3面]



文字サイズ
2025年4月3日 [3面]
2025年4月2日 [2面]
2025年4月1日 [2面]
2025年4月1日 [3面]
2025年3月28日 [3面]